
Monitoring of Bridge Movements During Operation with Ground-Based Radar and Machine Learning
Researchers in the ZEBBRA-project develop non-invasive, mobile, and innovative measurement and analysis methodologies to monitor and evaluate bridge conditions during operation. High-precision ground-based radars are mainly applied. Based on these radars, the bridge movements are measured, caused by vehicles crossing the bridge. The acquired radar data are then processed and analyzed with machine learning approaches to evaluate the bridge condition.
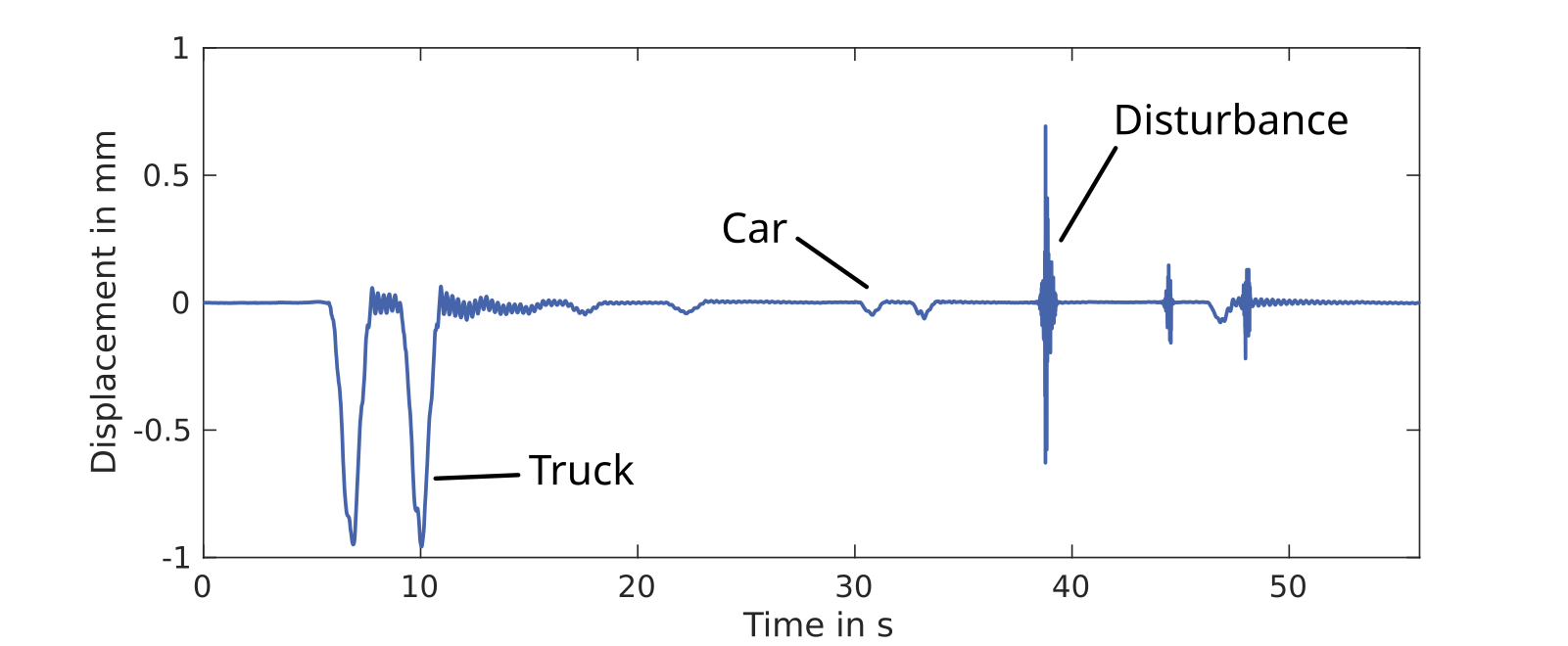
Detecting bridge movements with a ground-based radar requires a specific measurement setup. Since this radar measures contactless, the respective conditions at the bridge need to be considered, such as atmospheric surroundings or position of the bridge. In general, radar can measure the bridge movement without installing any corner reflectors at the bridge. For example, Michel & Keller (2021) propose their developed measurement concept "mirror-mode" to monitor bridge movements. Mirror-mode uses the flat underside of a bridge for a secondary reflection of the radar signal. Radar also differs from conventional sensors applied for bridge monitoring in evaluating measurement data. For example, external influences can easily affect the measurements. Michel & Keller (2021) show the removal of these influences and their effects on the accuracy of the data obtained. Additional processing steps remove, for example, disturbances caused by other objects in the radar signal (see Figure 1). Furthermore, propagation delays caused by atmospheric changes are also corrected. Then, depending on the respective measurement setup, a projection must be carried out. Finally, the displacements measured in the radar's line of sight are transformed into a standard coordinate system. Finally, an uncertainty assessment is given for all processing steps to estimate the accuracy of the results as best as possible and compare them with the conventional sensors.
Figure 1. Vertical displacement of the bridge extracted from radar signals including crossings of a truck and a car. (© Chris Michel, KIT/IPF).
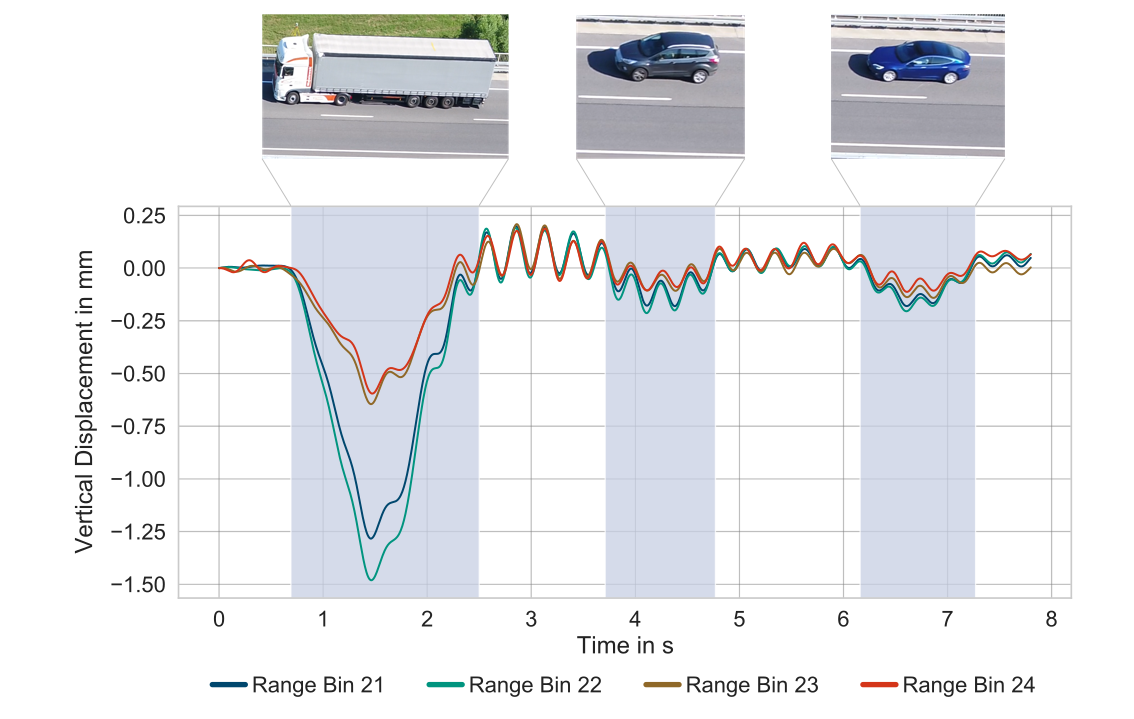
As a result of the raw radar data processing, we obtain the vertical displacement of the bridge. Figure 2 shows three different bridge crossings, referred to as events, and the corresponding vertical displacement for four measurement points (range bins) along the bridge. The images visualizing the different vehicles originate from video recordings of an unmanned aerial vehicle (UAV). In this specific scene, a truck crosses the bridge, followed by two passenger cars. In the measurement signals, the maximum displacement of the range bins can be used as an indicator of the vehicle's driving direction. After the truck has left the bridge, it continues to oscillate in its fundamental frequencies. With this oscillation, the deflections of the following passenger cars are superimposed.
Figure 2 adopted from Arnold & Keller (2020).
When assessing the bridge condition, we have to estimate the impact on the bridge caused by different vehicle crossings. In short, a classification of different vehicle types extracted from the radar data is necessary. Note that the UAV recordings are used as reference data. Therefore, it is essential to automatically detect the time segments from the radar signal during which a vehicle is on the bridge (event detection).
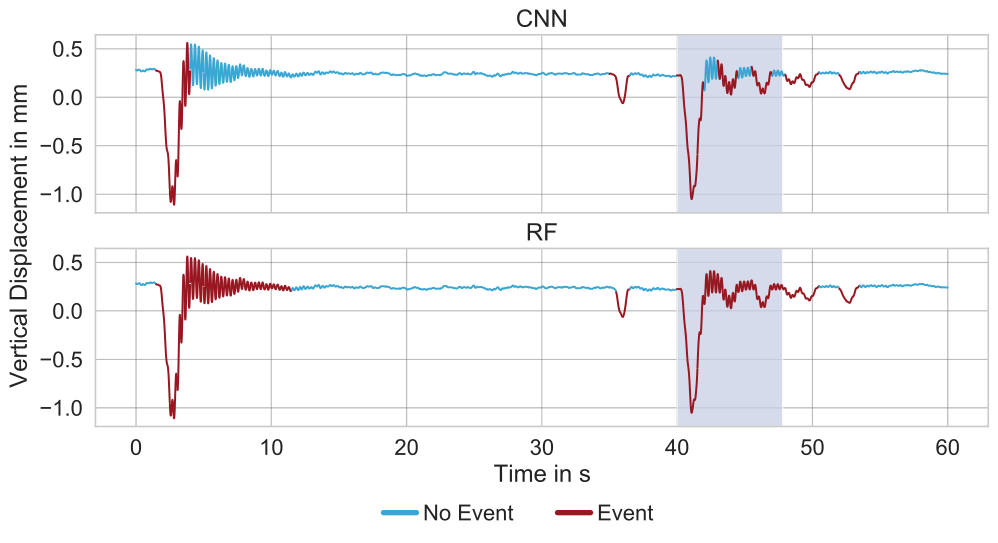
Arnold & Keller (2020) and Arnold et al. (2021) investigate two distinct approaches to classify event and non-events as well as several types of vehicles with radar times-series: a feature-based and a solely data-driven classification approach. For example, Figure 3 shows the comparison of the two approaches classifying between event and non-event. The upper section visualizes the results of the purely data-driven Convolutional Neural Network (CNN). The lower part of the figure shows the event detection results by a feature-based Random Forest (RF). The colored area corresponds to the sequence of Figure 2. Both approaches can detect events in bridge displacement data. While the RF cannot properly distinguish the decay processes and events, the CNN successfully detects the events. Since an event's start and end times are well detected, the combined results are well suited for vehicle type classification. Based on the vehicle crossing the bridge, it can be estimated which mass excited the bridge vibration. Thus, we can analyze whether the bridge motion for the specific excitation is normal or deviates from possible damage. A team of interdisciplinary researchers currently investigates this aspect of research within the ZEBBRA-project.
A summary on the studies and results of the ZEBBRA collaborative project can be found in Keller et al. (2020), among others, and on the ZEBBRA page of the Institute for Photogrammetry and Remote Sensing.
Figure 3 adopted from Arnold et al. (2021).
References
- Arnold, M.; Keller, S. (2020). Detection and classification of bridge crossing Events with ground-based interferometric radar data and machine learning approaches. ISPRS annals, V-1-2020, 109–116. doi:10.5194/isprs-annals-V-1-2020-109-2020.
- Arnold, M.; Hoyer, M.; Keller, S. (2021). Convolutional Neural Networks for Detecting Bridge Crossing Events With Ground-Based Interferometric Radar Data. ISPRS Ann. Photogramm. Remote Sens. Spatial Inf. Sci., V-1-2021, 31–38, https://doi.org/10.5194/isprs-annals-V-1-2021-31-2021, 2021.
- Michel, C.; Keller, S. (2021). Introducing a non-invasive monitoring approach for bridge infrastructure with ground-based interferometric radar. Proceedings of the European Conference on Synthetic Aperture Radar, EUSAR, pp. 1073-1077.
- Michel, C.; Keller, S. (2021). Advancing Ground-Based Radar Processing for Bridge Infrastructure Monitoring. Sensors 21, 2172.
- Keller, S.; Michel, C.; Schneider, O.; Müller, J.; Arnold, M.; Döring, A.; Hoyer, M.; Hinz, S.; Keller, H. B. (2020). Überwachung von Brückeninfrastrukturen: Neuer Ansatz von konventionellen und berührungslosen Sensoren. Brückenbau, (3), 22–29.
Associated institute at KIT: Institute of Photogrammetry and Remote Sensing (IPF)
Authors: Dr. Sina Keller, Chris Michel, Matthias Arnold (Nov. 2021)